

Rice Flight

Rice Flight at the 2024 Rice Engineering Showcase winning Best Aerospace or Transportation Technology
Rice Flight was formed two years ago as a competition team dedicated to designing and manufacturing RC aircraft. In our first year, we qualified for the 2023 AIAA Design, Build, Fly international competition, built a plane to competition specifications, and participated in the competition. This past year, we competed in the SAE Aero Advanced 2024 challenge. We were one of only three teams that was able to have our primary aircraft take off, successfully deploy the 1lb autonomous plane, and land, out of 17 teams competing. We are incredibly proud of our accomplishment, especially since the other teams had many years of experience. We have already started initial research and preparation work for next year’s competition, including developing our own custom data acquisition system and ground station, and writing a multidisciplinary design optimization program to help with initial aircraft sizing. We are very excited to continue learning and applying our knowledge!
2024-2025: SAE Aero Design
In 2025, we are planning to compete in two different divisions of SAE Aero –– Advanced and Regular.
For the Advanced competition, we are developing a 3.5 lb fully autonomous fixed-wing aircraft designed to deliver and recover payloads with pinpoint precision and capable of both conventional (horizontal) and vertical takeoff and landing. Our aircraft, Magpie, uses computer vision to identify a designated landing zone and payloads to be captured.
For the Regular competition, we are designing and manufacturing a 15-foot wingspan plane with a 750-Watt power limiter, with a goal of carrying as much payload weight as possible. Our aircraft, Condor, also needs to disassemble into components no larger than 48" in any direction, and take off in a maximum runway distance of 100 feet. To optimize the aircraft’s wing planform, we used a custom-developed multi-disciplinary design optimization (MDO) algorithm using Matlab and ANSYS Fluent to achieve the greatest lift possible while not exceeding our propulsion capabilities.
Magpie, the advanced aircraft, under construction
2023-2024: SAE Aero Design
For the 2023-2024 challenge, we were required to build a 10 ft wingspan ‘Primary Aircraft’ (PA) to fly a short course with a payload of water multiple times, each time deploying a separate one-pound autonomous plane. The deployed autonomous planes must land in a specified zone, and each must carry as its payload different components of a ground rover, which our team can assemble on the ground. The assembled rover is intended to carry the water from the PA across a 30-foot obstacle course to an endzone.
See our gallery for more photos of our design and manufacturing process, test flights, and competition!
Albatross
Albatross was Rice Flight’s Primary Aircraft (PA) for the 2024 SAE Aero Advanced competition. It has a maximum takeoff weight of 31 pounds, and a 9’8” wingspan using a NACA 4412 airfoil. The propulsion system consists of a BA4530 270kV electric motor powered by a 24 Volt 10 Ah lithium-polymer battery, and spinning a 22 inch propeller.
The main objectives for the competition were to carry two payloads: a static water payload, and a deployable Powered Autonomous Delivery Aircraft (PADA). At competition, in addition to carrying over 4 lbs of water as static payload, we were one of only 3 out of 17 teams in the Advanced class to successfully take off, deploy the PADA, and land.


One of the PADAs attached to the electromagnets prior to a test flight
The full CAD model for Albatross and an attached PADA
To deploy the PADA, Albatross uses a unique system of electromagnetic attachment. These are controlled by a flight computer connected to a ground control station, and can be turned off to deploy the attached PADA at the correct time. Every other team at the competition used a mechanical method to separate their PADAs from their Primary Aircraft, and most experienced issues with jamming or failure to deploy. In contrast to this, our method has never experienced a fault, and worked flawlessly at competition.

Electrical Block Diagram for Albatross
Fluffy, Scruffy, and Gruffy
Fluffy, Scruffy, and Gruffy were our three deployable autonomous delivery aircraft (PADA) for the 2024 SAE Aero Advanced competition. They are designed with a weight limit of only 1 lb, so use a delta-wing configuration to increase the wing area to generate sufficient lift. This delta-wing configuration limits control surfaces to elevons, a linear combination of traditional ailerons and elevators. In addition to elevons, there is also a vertical stabilizer and rudder for yaw control.

CAD Model of the PADAs
The PADAs are fully autonomous, deploying from the PA in flight, automatically arming, and flying to land at predefined GPS coordinates. The autopilot system is based around a PixHawk 2.4.8 running Ardupilot Plane 4.6, and to help with the autonomous control algorithms each PADA has a GPS unit and sonar rangefinder for determining altitude. A software configuration error at competition resulted in Scruffy nose diving when overcorrecting for altitude after deployment. However, when flying in test flights the PADAs were able to deploy off of Albatross and achieve stable flight before landing, and in ground tests were able to navigate to GPS coordinates for landing.

Electrical Block Diagram of a PADA
ALICE: Custom Ground Station Research
One of the projects Rice Flight is working on over the summer is our custom Data Acquisition System. To better suit the SAE Aero Advanced competition and our own aircraft, we are developing our own Ground Control Station (GCS) software, named ALICE: Advanced Logging Instrument for Computational Evaluation.
ALICE interfaces with the open source Micro Air Vehicle Link (MAVLink) standard for unmanned aerial vehicle communications. The backend portion of the software, written mostly in Python, uses the PyMAVLink library to handle these messages, requesting/receiving information from the aircraft and transmitting commands. Rice Flight is currently developing two different front ends for ALICE, one based on Python and the other using Javascript. Both front ends will provide highly customizable displays of in-flight telemetry like air speed, GPS coordinates, and battery and radio information. Additionally, they will both be easily extensible to accommodate features such as triggering payload deployment or cameras/gimbals, depending on the specific competition.

2024 Competition Poster

Competition poster for 2024 Rice Engineering Design Show Case and winner of the Best Aerospace and Transportation Award.
2022-2023: DBF (Design/Build/Fly)
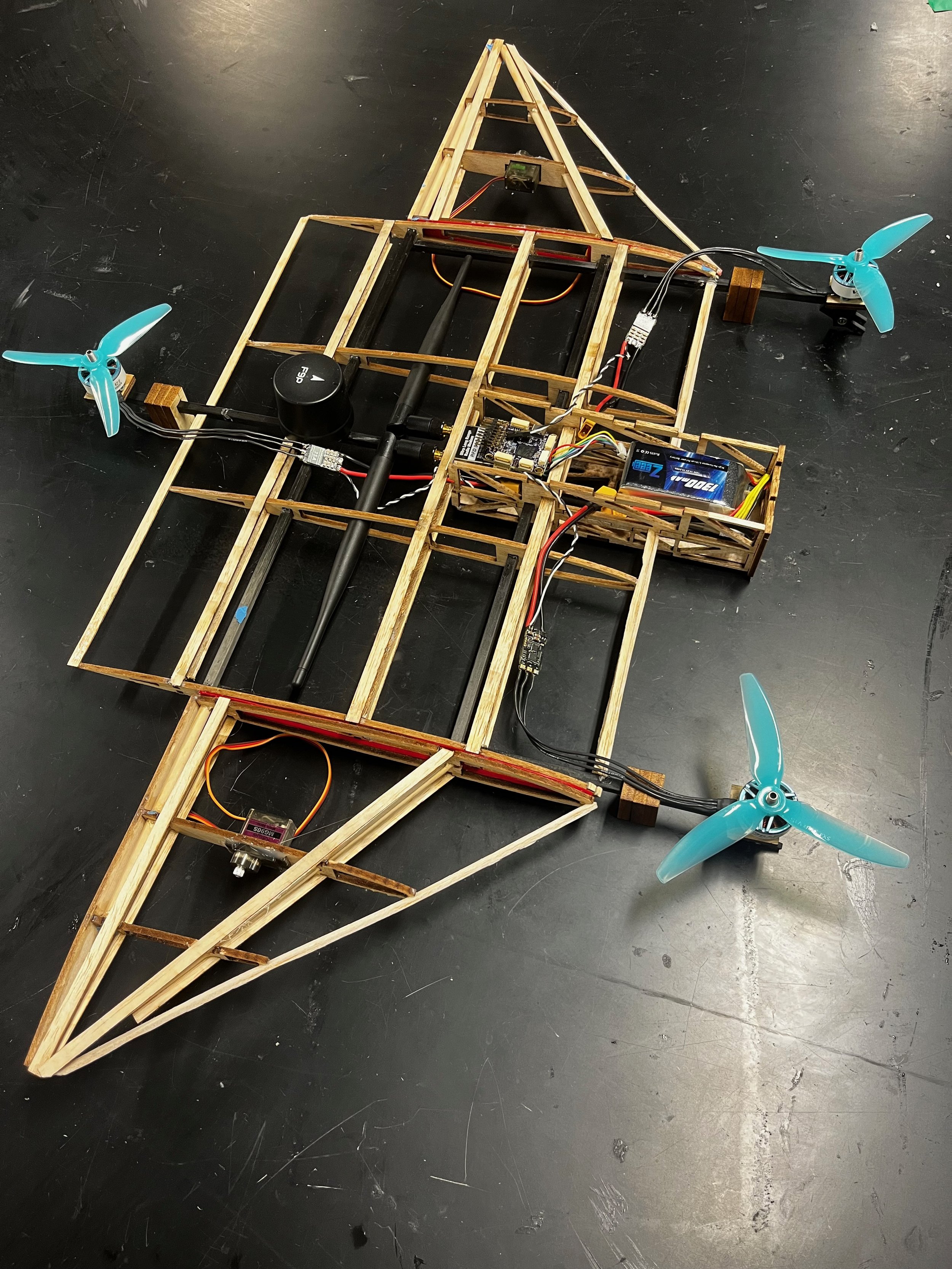
EA-23R OWLer
Rice Flight was founded in 2022. We competed in the AIAA Design, Build, Fly (DBF) competition in Tucson in April 2023. For the DBF competition that year, the challenge was mostly a matter of how quickly the aircraft could take off (within a 50’ limit) fly a 1000’ course with a tight turn, and land. We were limited to a 100 Watt-hour battery per motor, and the plane had to disassemble and fit in a box of 48 linear inches. The competition required us to be able to assemble the components of the plane in under a 5 minute window without any tools.
Because it was our first year and the team consisted entirely of underclassmen with no previous fixed-wing aviation experience, we did not place in competition, but we built OWLer to competition requirements and attended the event. We learned a lot by talking to mentors and other teams, and this set us up for success in future years.


Team members at competition in Tuscon, AZ
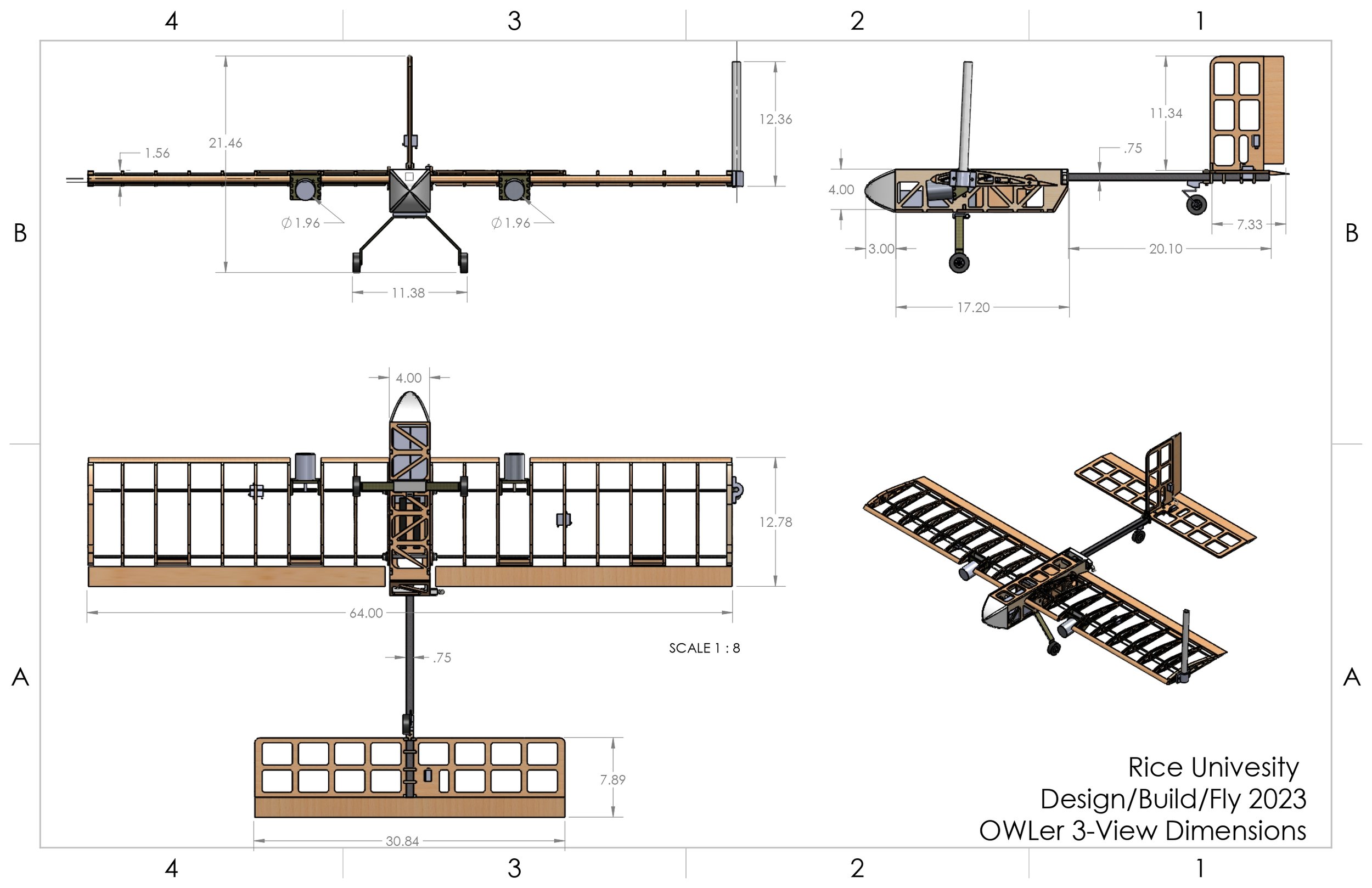
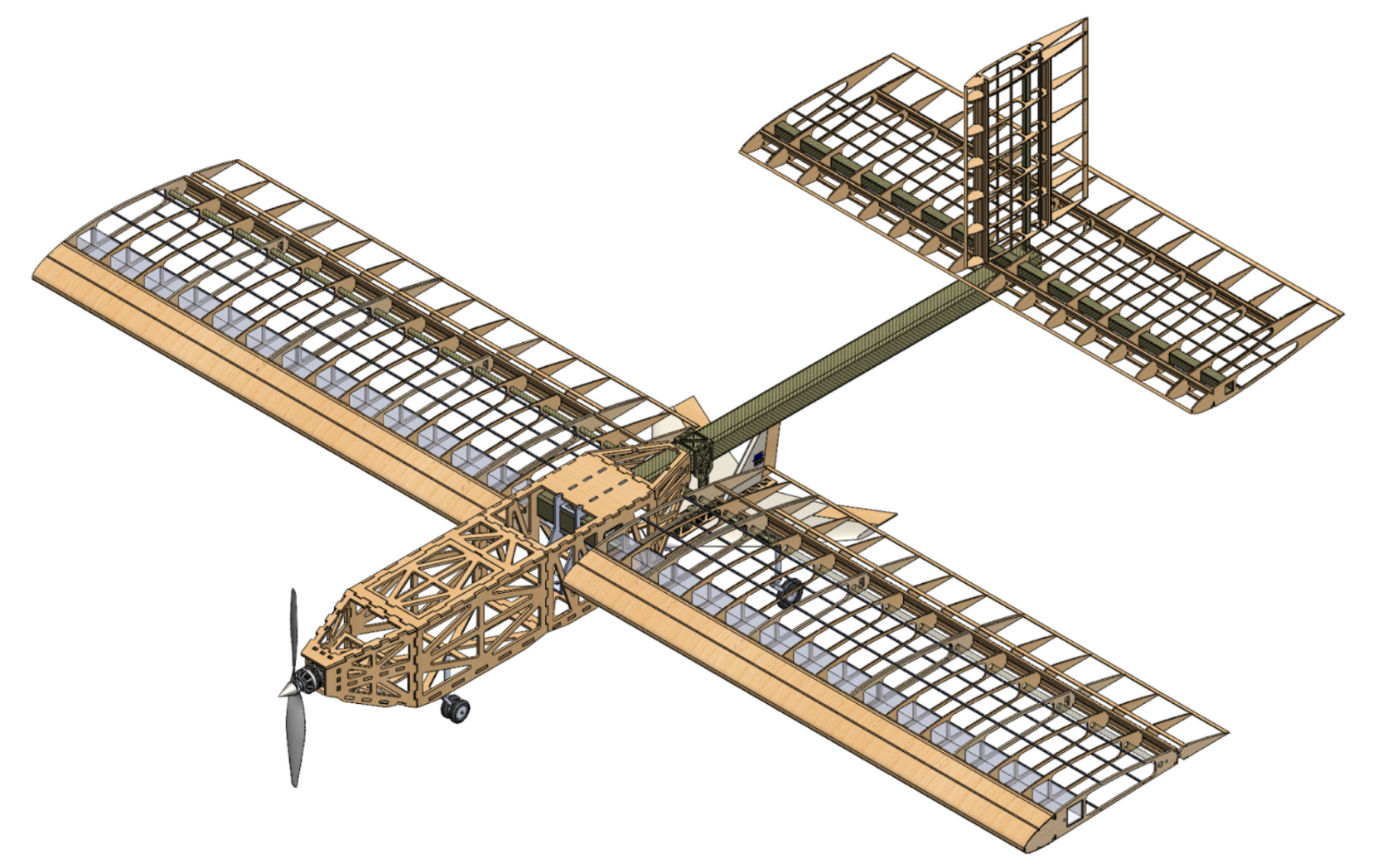
CAD design of the competition plane